
 English
English










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Varukorg
Din varukorg är tom, men det behöver den inte vara.
Overview
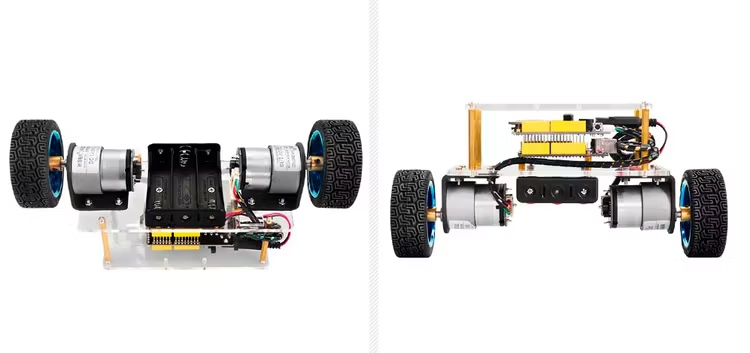
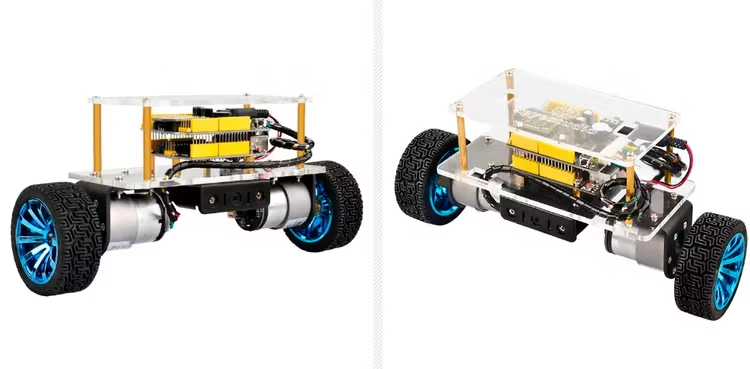
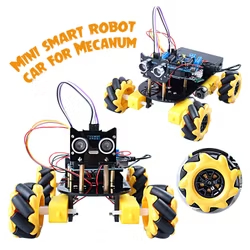
How to DIY a mini balance car on your own? This balance car kit is based on Arduino development platform. We mainly use UNO R3 as core and balance shield with built-in MPU-6050 as drive board to test the car body posture.
The balance shield comes with a Bluetooth interface, fully compatible with the Bluetooth XBee module (only compatible with Android system).
When connecting to Bluetooth, you can easily control the moving direction of balance car with Bluetooth APP, making a variety of unique postures.
To facilitate the operation control, Bluetooth APP has both key and gravity control modes.
Moreover, it adds the function of adjusting the balance angle and PID parameters as well, so you can perfectly adjust and control the balance car.
No need to worry how to play it. We can provide you with all assembly components, as well as the corresponding installation, debugging method and program.
Operation Principle
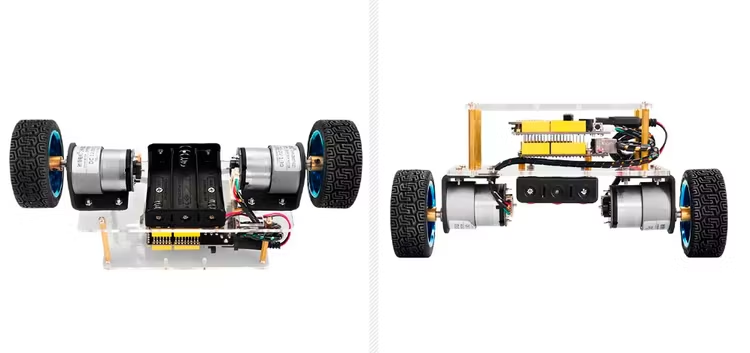
The self-balancing car uses the power of the car body to maintain the relative balance, which is a process of dynamic balance.
The power to maintain the balance of the car comes from the movement of the wheels, driven by two DC motors.
The control of the car body can be divided into three control tasks as follows:
1. Balance Control: keep the car upright and balanced by controlling the forward and backward rotation of the car’s wheel.
2. Speed Control: realize the front and rear movement and speed control by controlling the inclination of the car. In fact, it is achieved finally by controlling the speed of the motor.
3. Direction Control: realize the steering control by controlling the rotational speed differences between the two motors of the car.
In this way, it is relatively simple to understand the three control tasks.
But in the final control process, it comes down to the control of a control quantity. So there will be coupling between the three tasks, which will interfere with each other.
The key is to control the car’s balance; the speed and direction control should be as smooth as possible.
Parameters of balance car:
1. Working voltage: DC 9-12V
2. Motor drive chip: TB6612FNG
3. Body posture detection: MPU-6050
4. Comes with power control switch
5. Comes with Bluetooth control switch for controlling serial communication
Pay special attention to:
The balance shield comes with a slide switch for controlling the Bluetooth communication.
When upload the source code, must turn the slide switch OFF; otherwise, code uploading will fail.
When connecting to the Bluetooth module, should turn the slide switch ON.
Instructions follows with the robot
Din varukorg är tom, men det behöver den inte vara.