
 English
English






{kind=link}
{kind=link}
{kind=link}
{kind=link}
Varukorg
Din varukorg är tom, men det behöver den inte vara.
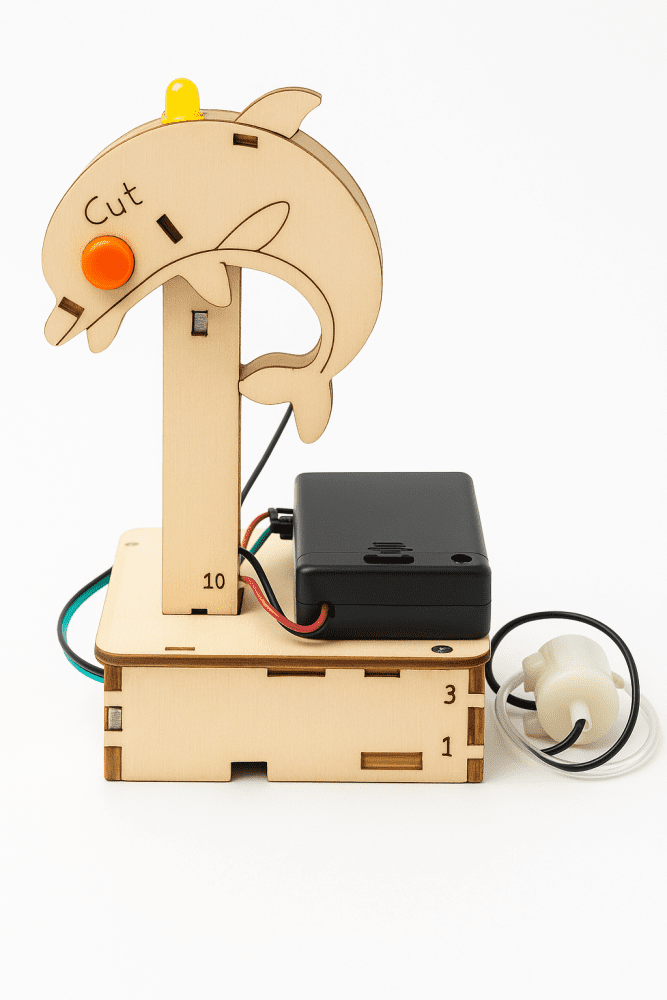
The TinkerKit Braccio is a fully operational robotic arm, controlled via Arduino. It can be assembled in several ways for multiple tasks such as moving objects. You can also attach a camera or solar panel. There are so many ways in which the Braccio can extend the reach of your devices.
It is recommended to power the board via the jack connection with a regulated 5 VDC @ 5000 mA power supply provided in the box.
There is an on-board voltage regulator for higher voltages that protect the Braccio shield. NOTE: The protection doesn’t work for the Arduino Yun if you put the bridge between Vin and 5V on the Arm Robot Shield V1 (a greater version of are called Braccio shield and has a power switch on the top of the shield)
Fully assembled Braccio Kit:
| Weight | 792 g |
| Maximum operating distance range | 80 cm |
| Maximum Height | 52 cm |
| Base Width | 14 cm |
| Gripper Width | 90 mm |
| Cable length | 40 cm |
| Load Capacity | Maximum weight at 32 cm operating distance: 150 g |
| | Maximum weight at the minimal Braccio configuration: 400g |
Braccio Shield: The maximum length and width of the Braccio Shield PCB are 2.7 and 2.1 inches respectively, with the power jack extending beyond the former dimension. Four screw holes allow the board to be attached to a surface or case. Note that the distance between digital pins 7 and 8 is 160 mil (0.16"), not an even multiple of the 100 mil spacing of the other pins.
| SpringRC SR431 - Dual Output Servo | |
| Control Signal | PWM Analog |
| Torque | @ 4.8V: 169.5 oz-in (12.2 kg-cm) |
| Weight | 2.19 oz (62.0 g) |
| Dimentions | 1.65×0.81×1.56 in (42.0×20.5×39.5 mm) |
| Speed | @ 4.8V: 0.20 sec/60° |
| Rotation Support | Dual Bearings |
| Gear Material | Metal |
| Rotation Range | 180° |
| Connector Type | J (aka Futaba) |
| SpringRC SR311 | |
| Control Signal | PWM Analog |
| Torque | @ 4.8V: 43.13 oz-in (3.1 kg-cm) |
| Weight | 0.95 oz (27.0 g) |
| Dimentions | 1.23×0.65×1.13 in (31.3×16.5×28.6 mm) |
| Speed | @ 4.8V: 0.14 sec/60° |
| Rotation Support | Dual Bearings |
| Gear Material | Metal |
| Rotation Range | 180° |
| Connector Type | J (aka Futaba) |



Din varukorg är tom, men det behöver den inte vara.