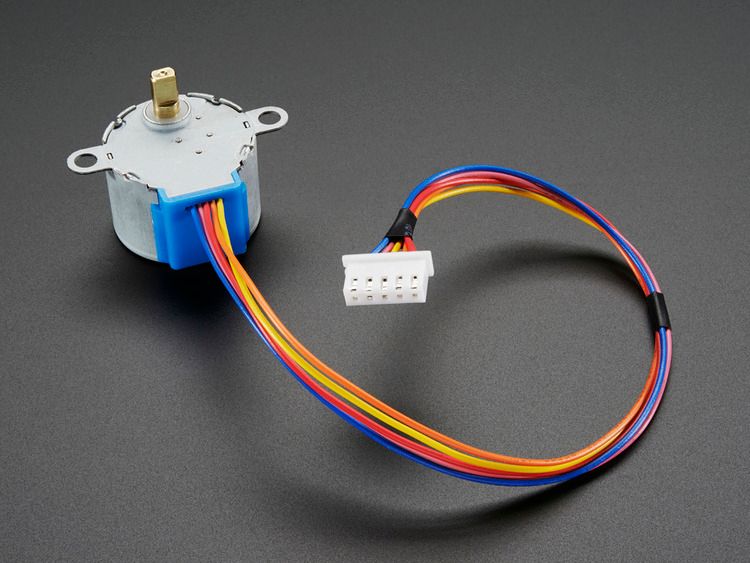
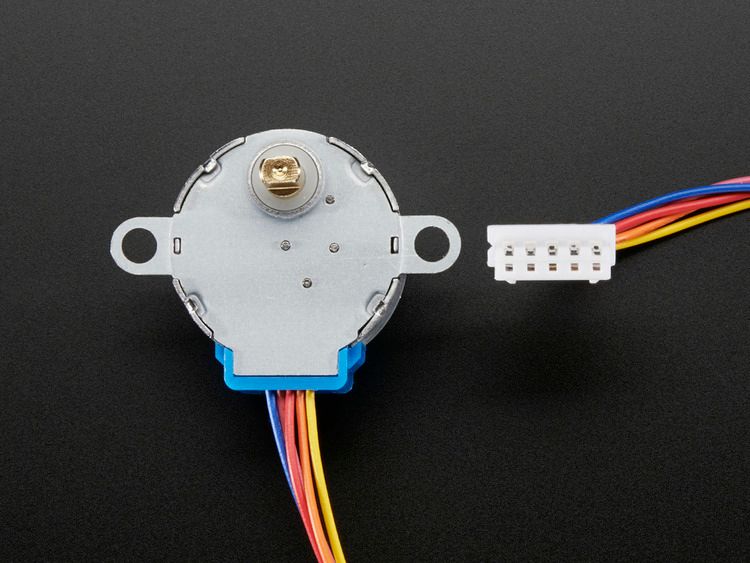
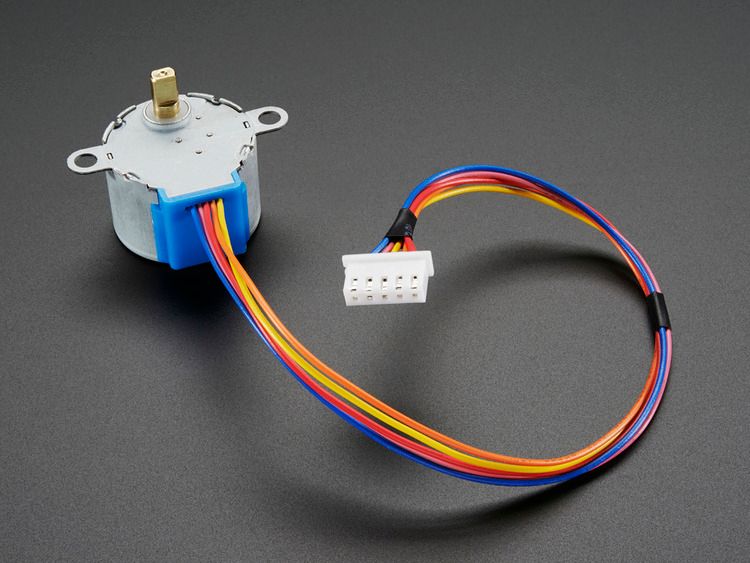
Small Reduction Stepper Motor - 12VDC 32-Step 1/16 Gearing
175 kr
This is a great first stepper motor, good for small projects and experimenting with steppers. This uni-polar motor has a built in mounting plate with two mounti
Article Number:
810
Share
Information
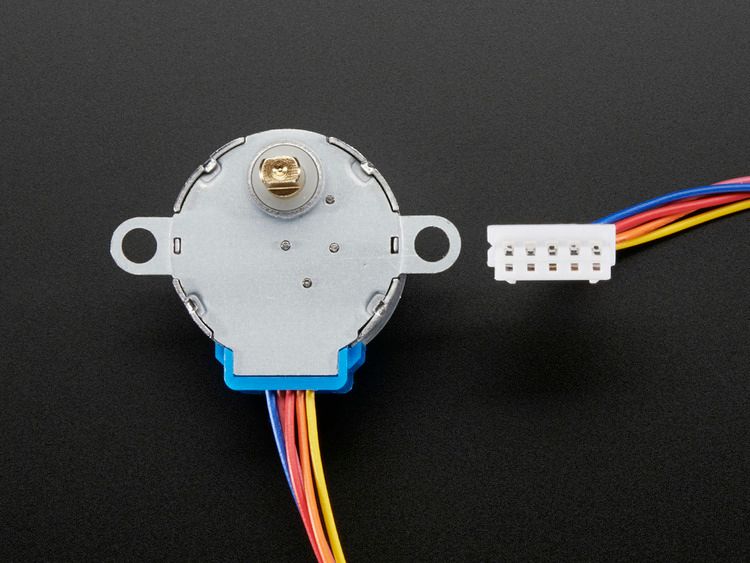
This is a great first stepper motor, good for small projects and experimenting with steppers. This uni-polar motor has a built in mounting plate with two mounting holes. There are only 32 step (11.25 degree) per revolution, and inside is a 1/16 reduction gear set. (Actually its 1/16.032 but for most purposes, 1/16 is a good enough approximation) What this means is that there are really 32*16.032 steps per revolution = 513 steps! The shaft is flattened so it's easy to attach stuff to it with a set-screw. A perfect first stepper motor and works well with the Motor Shield for Arduino.
The gearing has a few side effects which are important to note. First, you can turn the stepper by hand but not as smoothly as an un-geared stepper. It also means you shouldn't use interleaved or micro-stepping to control or it will take forever to turn. Instead, use single or double stepping. The torque is fairly high but its slower than un-geared steppers - we maxed out at about 80 RPM when powering with 12VDC and about 50 RPM on 9VDC.
To use with the Adafruit Motor Shield, connect red to ground (middle), orange and pink to one motor port (say M1) and blue and yellow to the other motor port (say M2). So in order, that's: orange - pink - red - blue - yellow. Then just use the example code that comes with the Adafruit Motor Shield library and set the constructor toAdafruit_StepperMotor *myMotor = AFMS.getStepper(513,moratorium) and the speed at 5 RPM by callingmotor->setSpeed(5). Otherwise, you can also wire it up with some transistors and use the Arduino Stepper library
TECHNICAL DETAILS
Unipolar stepper with 0.1" spaced 5-pin cable connector
32 steps per revolution
1/16.025 geared down reduction
5V-12V DC suggested operation
Weight: 37 g.
Dimensions: 28mm diameter, 20mm tall not including 9mm shaft with 5mm diameter

 Svenska
Svenska








{kind=link}
{kind=link}
{kind=link}





