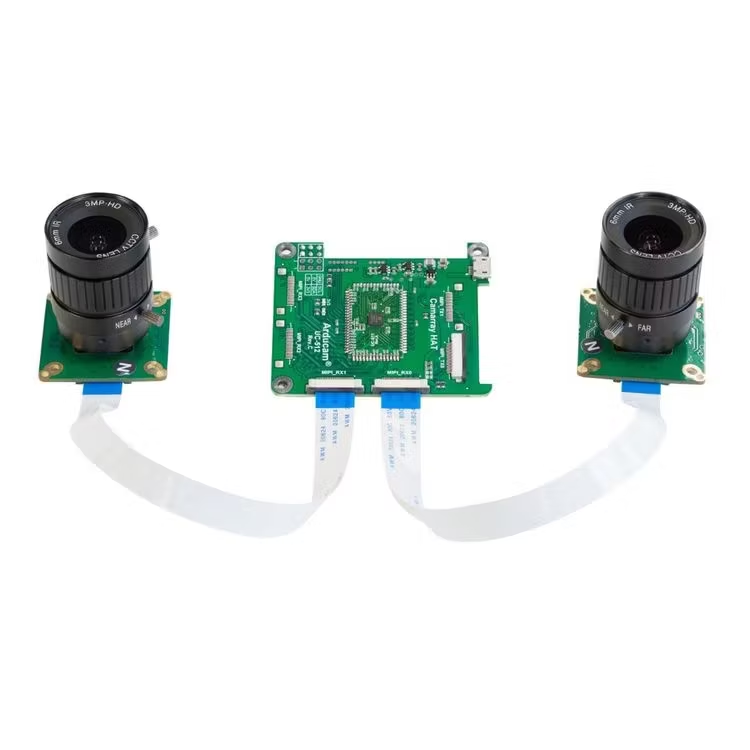
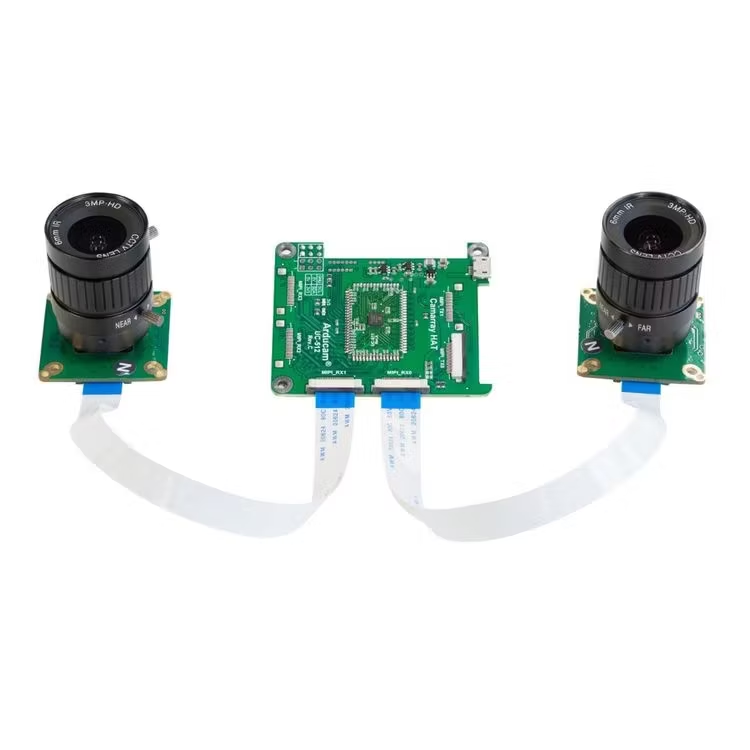
Arducam 12MP*2 Synchronized Stereo Camera Bundle Kit for Nvidia Jetson Nano and Xavier NX, Two 12.3MP IMX477 Camera Modules with CS Lens and Camarray Stereo Camera HAT.
This Arducam 12MP Synchronized Stereo Camera Bundle Kit is capable of running two 12MP IMX477 Camera Modules simultaneously through a single MIPI CSI-2 camera slot connection on the Jetson Nano and Jetson Xavier NX. It consists of two 12MP High Quality IMX477 camera module and an Arducam stereo camera HAT. The stereo camera HAT is enabled by ArduChip to disguise the dual-camera connection as a single camera to be accepted by these single-board computers. You can use this bundle to build your stereo camera system for depth-related vision applications or upgrade your IMX219 stereo setup.
★ KERNEL CAMERA DRIVER USED
This camera relies on kernel drivers to work – one kernel version, one camera driver.
- Versions earlier than JetPack 4.3 (L4T 32.3.1) are not supported.
- Up or downgrading your OS leads to a kernel bump, and you’ll need to re-install a matching driver.
- Future JetPack/kernel updates require future drivers. When that happens, please allow us some time to process. And if you don’t see it released in time, kindly remind us.
- Work Natively with Jetson Nano and Jetson Xavier NX. NOTE: This bundle can’t work with Raspberry Pi
- High Resolution: This bundle includes two high quality cameras, which adopts 1/2.3″ 12.3 Megapixel IMX477 sensor for sharp image, max. still resolution 4056(H) x 3040(V). The cameras also come with two 6mm focal length CS-Mount lenses, which equipped with a manual focus ring and an adjustable aperture ring.
- Complete Synchronization: The frames of dual cameras of this module are synchronized at the hardware level, extra synchronization scheme by time stamping or so does not need to be considered.
- Variable Baseline Extension: Compared to the fixed stereo camera module, this stereo camera bundle has higher flexibility, which can be used with a variable baseline device and controlled through the computer control system to achieve rapid and dynamic interactive adjustment of the moving parts for human-like multi-degree-of-freedom stereo binocular vision.
Applications
- Robot navigation
- Objective tracking
- 3D measurement
- 3D reconstruction
- Depth-related vision applications
Key Specifications
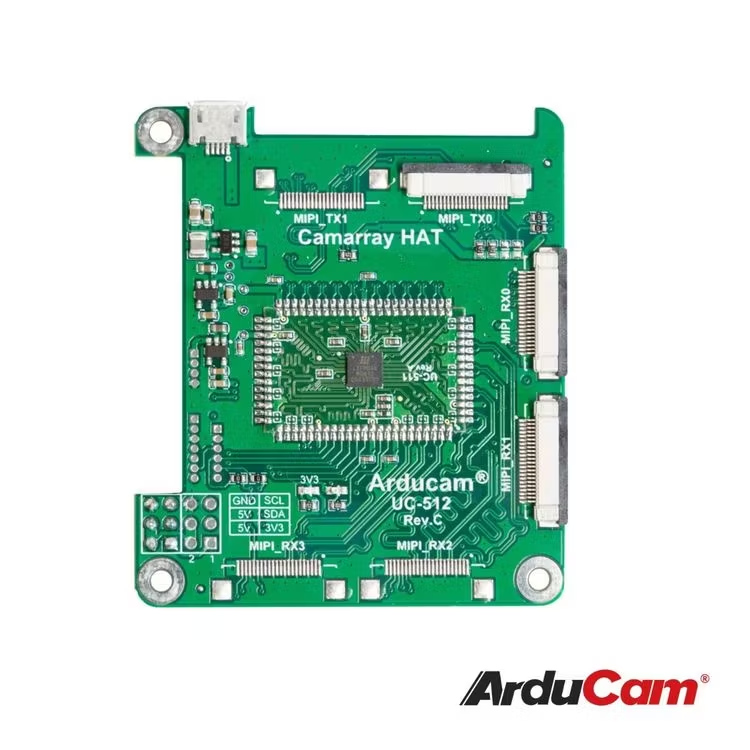
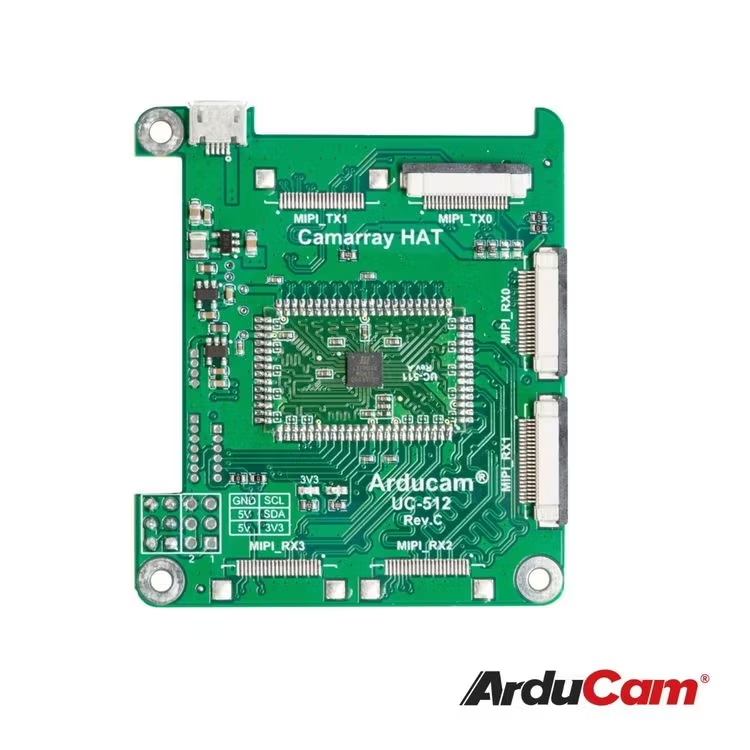
– Camarray Stereo Camera HAT
Package Including:
- 2 pcs 12.3MP IMX477 color camera module mounted with CS lens
- 1 pcs Arducam Camarray Stereo Camera HAT
- 2 pcs 150mm/6inch 22pin to 22pin camera cables
- 1 pcs 300mm/12inch 15pin to 22pin camera cable
- 2pcs M2.5*10mm Nylon Hex Standoffs
- 2pcs M2.5*6mm Nylon Screws
Documentation:
Camarray – Arducam 12MP Synchronized Stereo Camera Bundle Kit
- Support Jetson Nano/NX
- Two MIPI camera inputs and one MIPI camera output
- Support 1/2 lane MIPI cameras input up-to 1Gbps/lane
- Support 2 lane MIPI output up-to 1Gbps/lane
- Support RAW8/RAW10/RAW12 output format, the output format automatically changes with the input format
- Support Jetson Native commands for IMX219/IMX477 cameras with half resolution combine
- Support Arducam Jetson cameras up to 16MP with proprietary camera driver with full resolution combine
- Support camera side-by-side combine, channel 0 and channel 1 software switching on the fly
- HAT Size: 65 x 56 mm
– Camera
- Sensor: IMX477
- Optical Format: 1/2.3″ (diagonal 7.857mm)
- Resolution: 4056(H) x 3040(V) 12.3MP
- Pixel Size: 1.55um x 1.55um
- IR Sensitivity: Visible light
- Interface: 4-lane MIPI CSI-2
- Default Lens Mount: CS-Mount
- Video Modes: 8-bit RAW, 8fps@4056*2 × 3040 with Arducam driver
- Board Size: 38×38mm
- Hole Pitch: Compatible with 29mm, 30mm, 34mm
– Lens
- Format: 1/2.3 inch
- Focal Length: 6mm
- Aperture (F): Max. F1.2
- Field of View (FOV): 65° (H)
- Mount: CS-Mount
- Back Focal Length: 7.53mm
- MOD: 0.2m
- Dimension: Φ30×31mm
- Weight: 53g
Documentation:
Camarray – Arducam 12MP Synchronized Stereo Camera Bundle Kit
Camarray: Stereo Vision Solutions for Embedded Systems (Pi, Jetson Nano/Xavier NX and more)

 English
English









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
