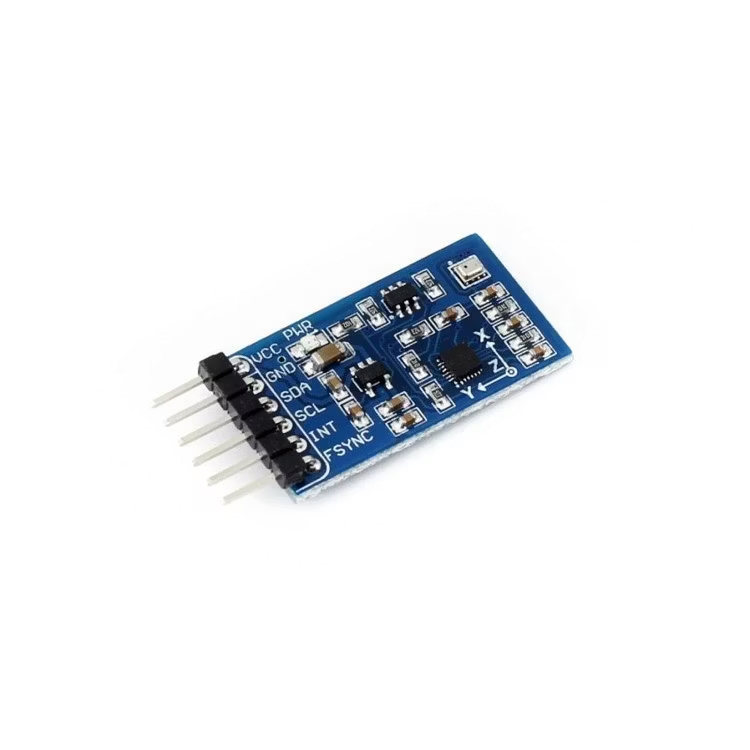
10 DOF IMU Sensor (C) is good at motion monitor, as well as detecting/measuring the position, height, and temperature. It would be helpful for making your own copter or balancing robot, provides great man-machine interaction.
Features
- MPU9250: 3-axis gyroscope, 3-axis accelerometer, and 3-axis compass/magnetometer
- Internal Digital Motion Processing™ (DMP™) engine, offloads complicate fusion calculation, sensor synchronization, gesture recognition, etc.
- Comparing with MPU6050, it is lower power consumption, and more suitable for wearable devices
- BMP280: barometric pressure sensor
- Embedded temperature sensor for temperature compensation
- Comparing with BMP180, it is lower power consumption, and higher performance
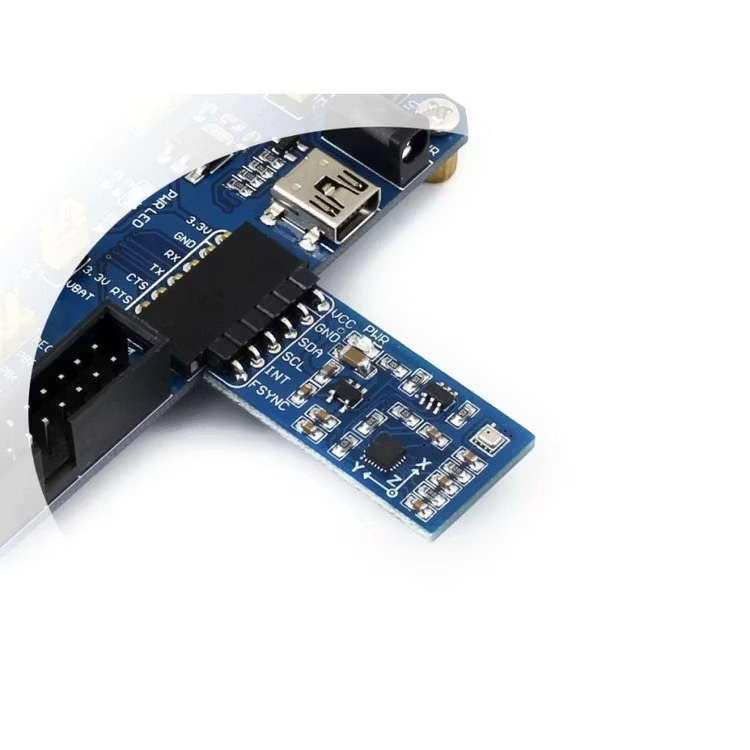
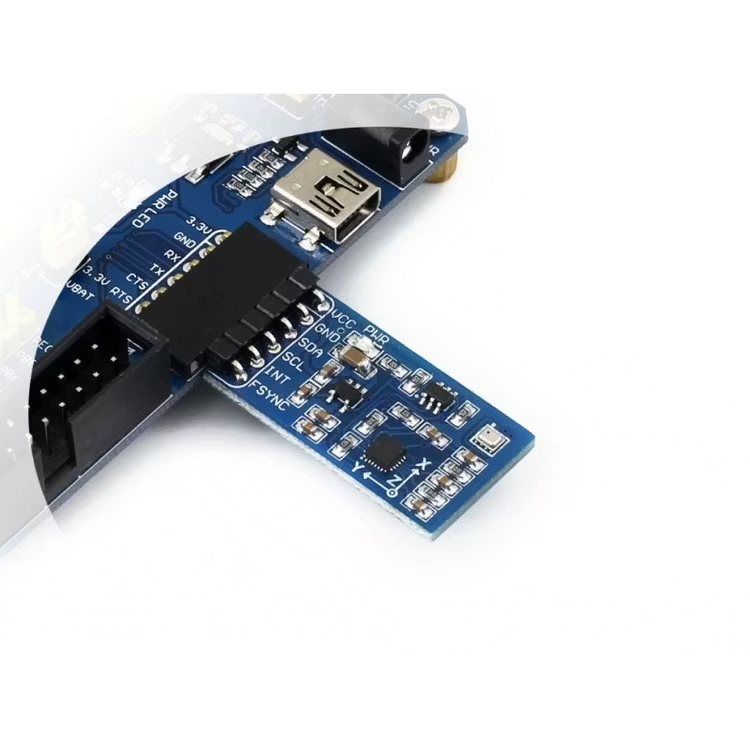
- You can get the 10 DOF data through I2C interface
Specifications
- Power: 3.3V~5.5V (internal voltage regulation with low dropout)
- Accelerometer
- Resolution: 16 bit
- Measurement range (configurable): ±2, ±4, ±8, ±16g
- Operating current: 450uA
- Gyroscope
- Resolution: 16 bit
- Measurement range (configurable): ±250, ±500, ±1000, ±2000°/sec
- Operating current: 3.2mA
- Compass/Magnetometer
- Resolution: 14bit
- Measurement range: ±4800µT
- Operating current: 280uA
- Barometric pressure sensor
- Barometric resolution: 0.0016hPa
- Temperature resolution: 0.01°C
- Measurement range: 300~1100hPa (altitude: +9000m ~ -500m)
- Barometric relative accuracy (700hPa~900hPa, 25°C~40°C): ±0.12hPa (±1m)
- Operating current (1Hz update rate, ultra-low power mode): 2.8uA
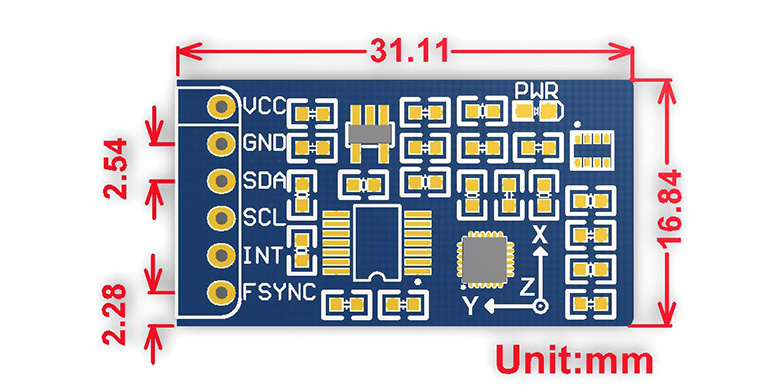
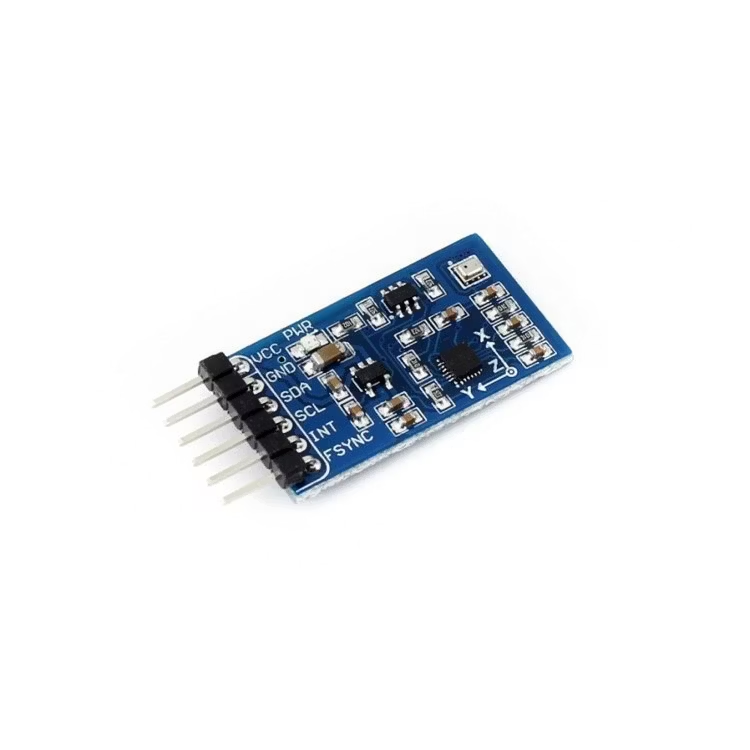
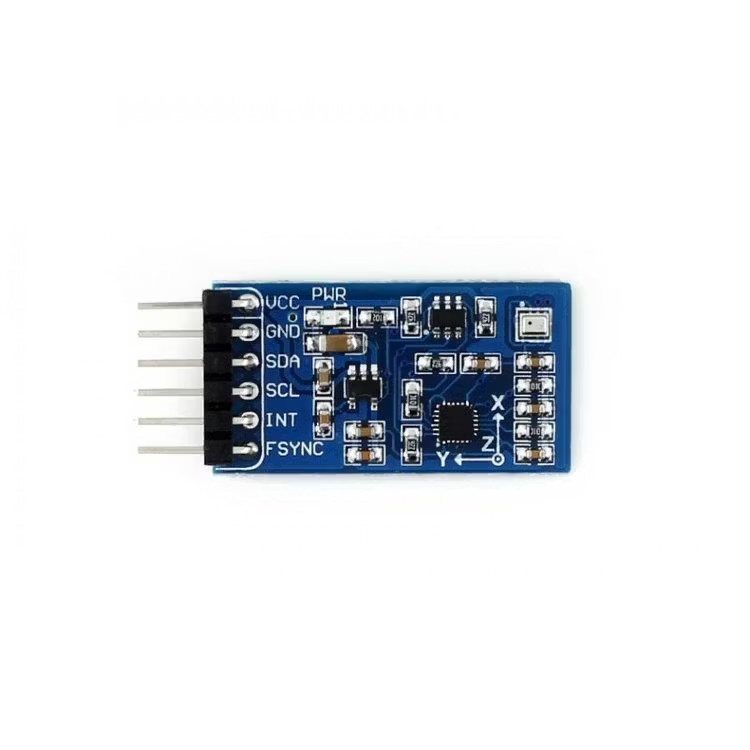
Interface
| PIN NO. | SYMBOL | DESCRIPTION |
|---|
| 1 | VCC | 3.3V~5.5V power supply |
| 2 | GND | power ground |
| 3 | SDA | I2C data pin |
| 4 | SCL | I2C clock pin |
| 5 | INT | MPU9250 digital interrupt output |
| 6 | FSYNC | MPU9250 frame sync signal |
Dimension

Development Resources
Wiki: www.waveshare.com/wiki/10_DOF_IMU_Sensor_(C)
Shipping list
Weight: 0.003 kg
- 10 DOF IMU Sensor (C) × 1
10 DOF IMU Sensor (D), Inertial Measurement Unit, ICM20948 Onboard, Lower Power Consumption, High Precision
Overview
10 DOF IMU Sensor (D) features the low power ICM20948 onboard, it is good at motion monitoring, as well as detecting/measuring the position, height, and temperature.
This tiny module would be helpful for making your own copter or balancing robot, provides great man-machine interaction.
Features
- ICM20948: low power 3-axis gyroscope, 3-axis accelerometer, and 3-axis compass/magnetometer
- Internal Digital Motion Processing™ (DMP™) engine, offloads complicate fusion calculation, sensor synchronization, gesture recognition, etc.
- Comparing with MPU9250, it is higher precision, lower power consumption, and more suitable for wearable devices
- BMP280: barometric pressure sensor
- Embedded temperature sensor for temperature compensation
- Comparing with BMP180, it is lower power consumption, and higher performance
- You can get the 10 DOF data through I2C interface
Specifications
- Power: 3.3V~5V (internal voltage regulation with low dropout)
- Accelerometer
- Resolution: 16 bit
- Measurement range (configurable): ±2, ±4, ±8, ±16g
- Operating current: 68.9uA
- Gyroscope
- Resolution: 16 bit
- Measurement range (configurable): ±250, ±500, ±1000, ±2000°/sec
- Operating current: 1.23mA
- Compass/Magnetometer
- Resolution: 16 bit
- Measurement range: ±4900µT
- Operating current: 90uA
- Barometric pressure sensor
- Barometric resolution: 0.0016hPa
- Temperature resolution: 0.01°C
- Measurement range: 300~1100hPa (altitude: +9000m ~ -500m)
- Barometric relative accuracy (700hPa~900hPa, 25°C~40°C): ±0.12hPa (±1m)
- Operating current (1Hz update rate, ultra-low power mode): 2.8uA
Interface
| PIN NO. | SYMBOL | DESCRIPTION |
|---|
| 1 | VCC | 3.3V~5.5V power supply |
| 2 | GND | power ground |
| 3 | SDA | I2C data pin |
| 4 | SCL | I2C clock pin |
| 5 | INT | ICM20948 digital interrupt output |
| 6 | FSYNC | ICM20948 frame sync signal |
Dimension
Development Resources
Wiki: www.waveshare.com/wiki/10_DOF_IMU_Sensor_(D)
Shipping list
Weight: 0.003 kg
- 10 DOF IMU Sensor (D) x1

 Svenska
Svenska





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}