
 English
English











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Varukorg
Din varukorg är tom, men det behöver den inte vara.
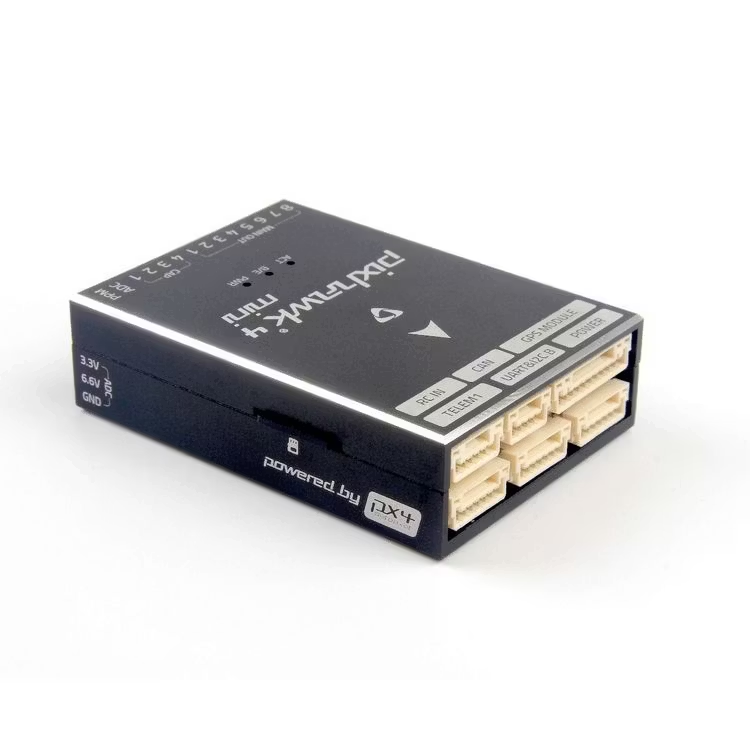
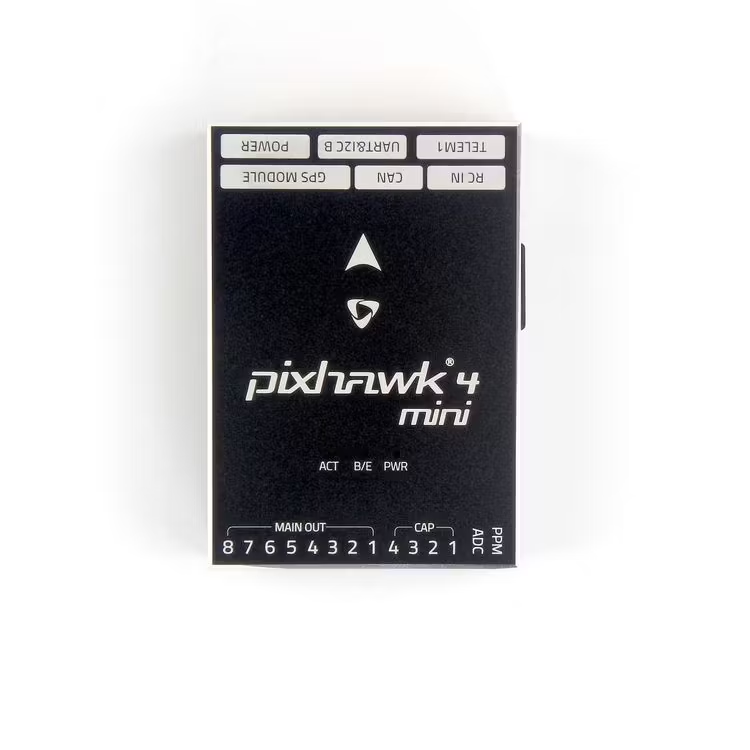
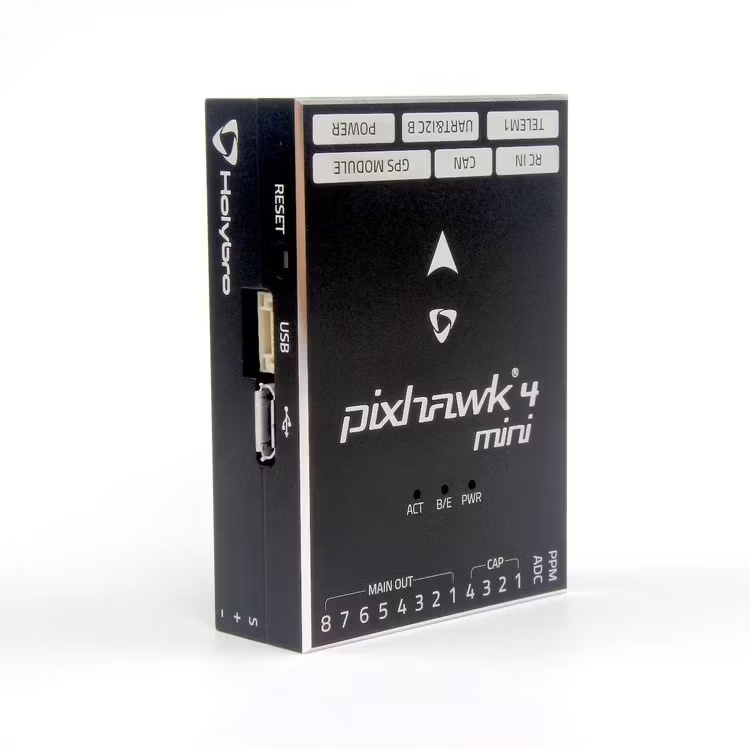
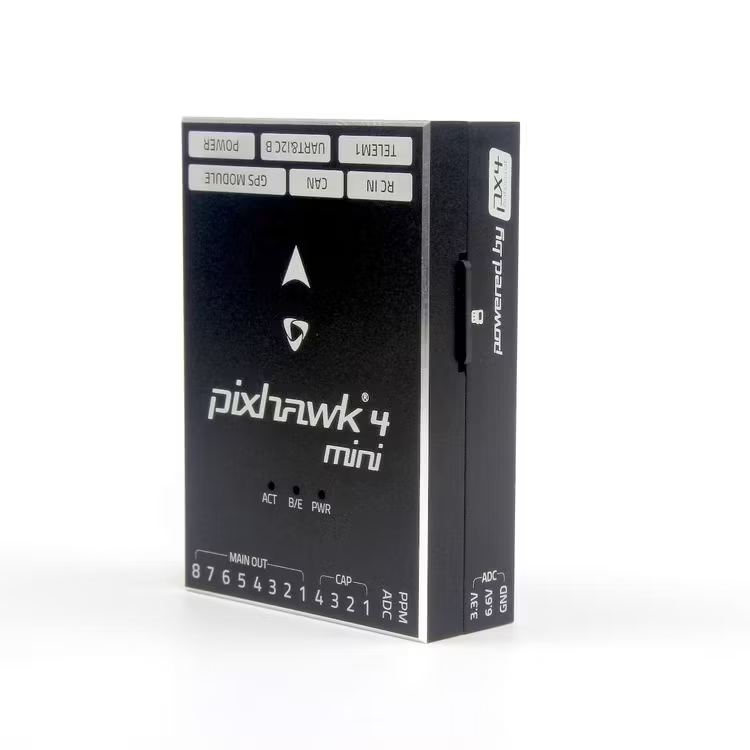
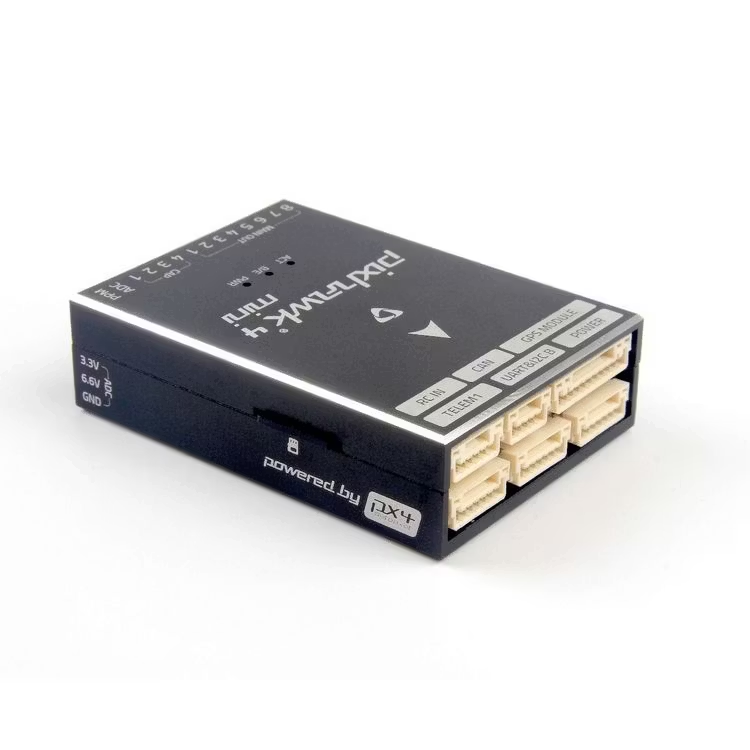
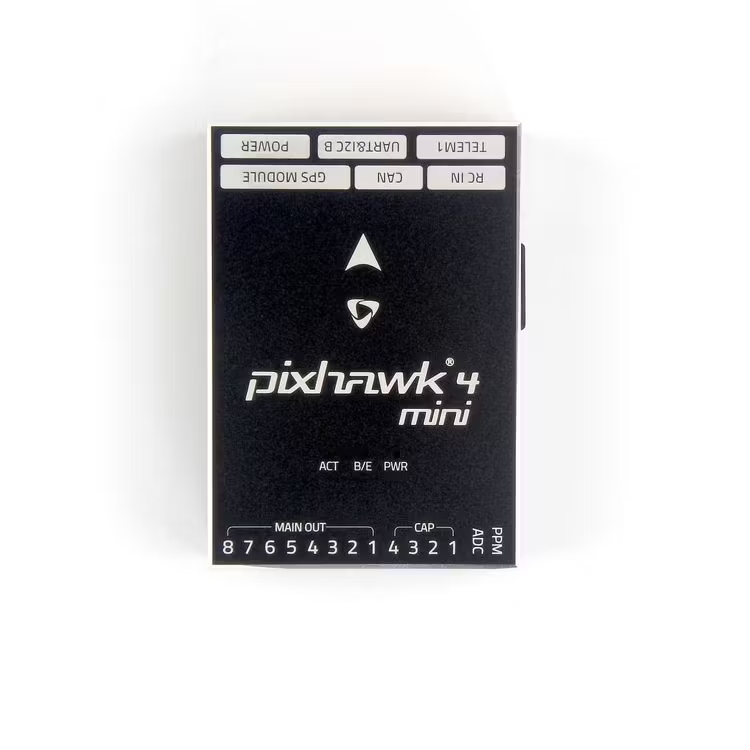
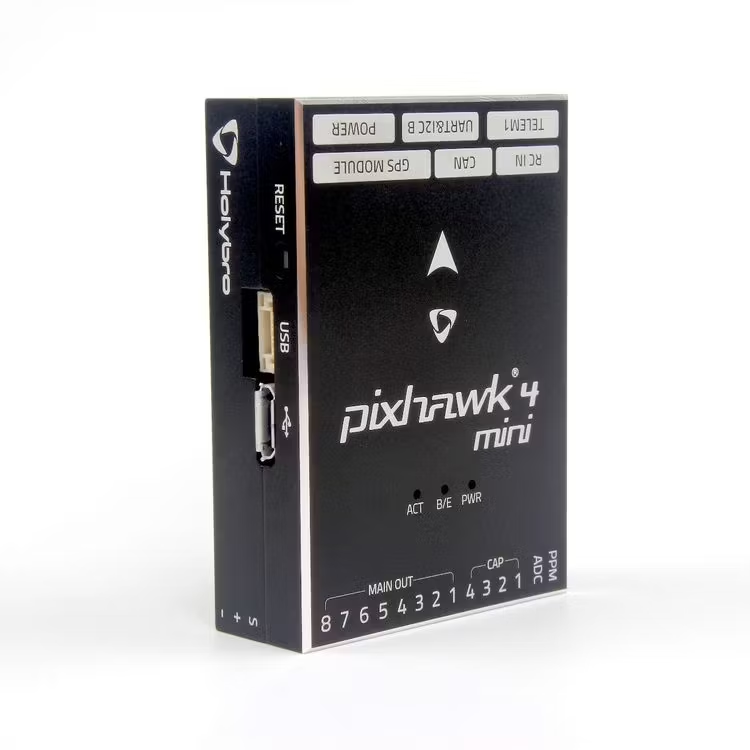
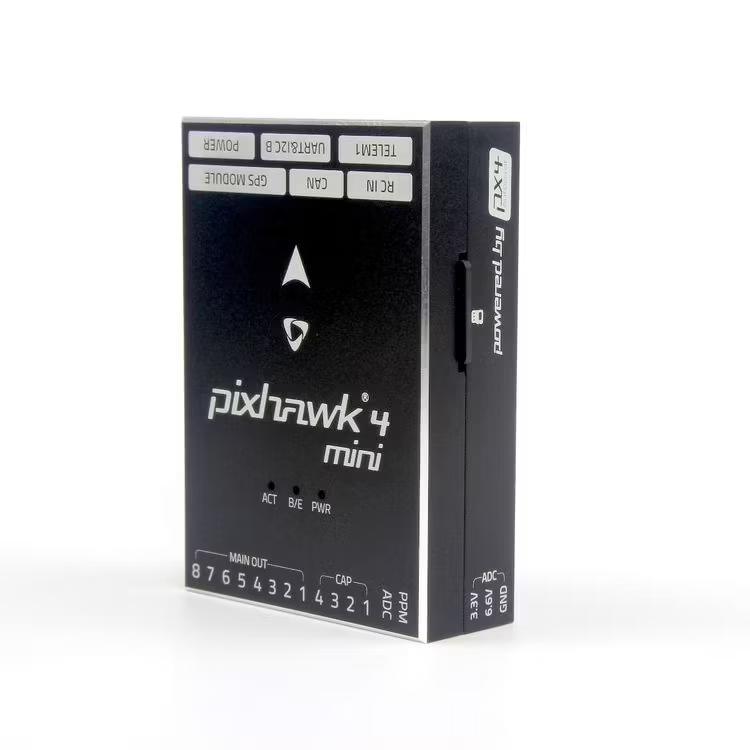
The Pixhawk® 4 Mini autopilots is designed for engineers and hobbyists who are looking to tap into the power of Pixhawk 4 but are working with smaller drones. Pixhawk 4 Mini takes the FMU processor and memory resources from the Pixhawk 4 while eliminating interfaces that are normally unused. This allows the Pixhawk 4 Mini to be small enough to fit in a 250mm racer drone.
Pixhawk 4 Mini was designed and developed in collaboration with Holybro® and Auterion®. It is based on the Pixhawk FMUv5 design standard and is optimized to run PX4 flight control software.
Pixhawk4 mini firmware version:1.8.0 dev

Some Tips:
Downloads:
Pixhawk 4 Mini Wiring Quick Start
Pixhawk 4 Mini Technical Data Sheet
Pixhawk4-GPS-Quick-Start-Guide
Ardupilot Stack:
Din varukorg är tom, men det behöver den inte vara.